









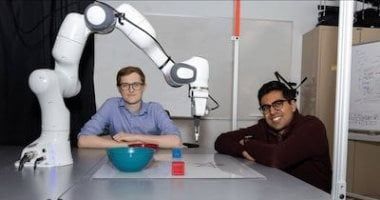
في إنجاز علمي لافت قد يعيد رسم ملامح مستقبل الروبوتات الذكية، نجح فريق من العلماء في «إمبريال كوليدج لندن» في تدريب ذراع روبوتية على تنفيذ 1000 مهمة مختلفة خلال يوم واحد فقط، بعد فترة تدريب لم تتجاوز ثماني ساعات، الإنجاز اعتمد على أسلوب تعلّم جديد يُعرف باسم MT3 (Multi-Task Trajectory Transfer)، وهو نظام تعلّم بالمحاكاة يسمح للروبوت باكتساب مهارات معقّدة انطلاقًا من عرض واحد فقط لكل مهمة.
الذراع الروبوتية المستخدمة في التجربة، وهي من طراز Sawyer، تمكنت من تنفيذ مهام متعددة شملت استخدام الأدوات، والتقاط ورفع أكثر من جسم في آن واحد، والتعامل مع أوضاع مختلفة للأشياء، دون الحاجة إلى إعادة تدريب شاملة أو الاعتماد على قواعد بيانات ضخمة، وهو ما يمثل قفزة نوعية في مجال تعلّم الآلة والروبوتات.
تعلّم من عرض واحد فقط
على عكس أساليب التعلّم التقليدية في الروبوتات، التي تتطلب آلاف أو حتى ملايين الأمثلة التدريبية، يعتمد نظام MT3 على مبدأ التعلّم بالمحاكاة من عرض واحد فقط.
إذ يشاهد الروبوت إنسانًا يؤدي المهمة مرة واحدة، ثم يقوم بتحليل الحركة وتقسيمها إلى مراحل يمكن إعادة استخدامها وتكييفها مع مهام أو أجسام جديدة، وهذا النهج يقلل بشكل كبير من الوقت والموارد المطلوبة لتدريب الروبوتات، ويفتح الباب أمام استخدامها في بيئات واقعية متغيرة، مثل المصانع، والمستودعات، وحتى المنازل، حيث يصعب توفير بيانات تدريب ضخمة لكل سيناريو محتمل.
تقسيم ذكي للحركة وفهم للسياق
وفقًا لتقرير نشرته مجلة Science Robotics، يعتمد نظام MT3 على فصل كل مهمة إلى مرحلتين أساسيتين، هما مرحلة المحاذاة (Alignment): حيث يتعلم الروبوت كيفية الاقتراب من الجسم أو الأداة بالشكل الصحيح، ومرحلة التفاعل (Interaction): وفيها ينفذ الروبوت الحركة المطلوبة مثل الإمساك أو النقل أو الاستخدام.
كما يستخدم النظام آلية استرجاع ذكية للذاكرة، تسمح له باختيار أقرب عرض تدريبي سابق يتناسب مع المهمة الجديدة، بناءً على وصف المهمة وإدراك البيئة المحيطة. هذه القدرة على “اختيار الخبرة المناسبة” تمنح الروبوت مرونة عالية في التكيّف مع مواقف جديدة دون الوقوع في أخطاء سلوكية.
سلوك أكثر قابلية للفهم والثقة
من أبرز ما يميز نظام MT3 أنه لا يعتمد على نماذج التعلم العميق “الصندوق الأسود” الشائعة، والتي غالبًا ما يصعب تفسير قراراتها. وبدلًا من ذلك، يوفر هذا النظام سلوكًا واضحًا وقابلًا للتفسير، ما يجعل تصرفات الروبوت أكثر موثوقية بالنسبة للبشر.
ويؤكد الباحثون أن هذه القابلية للتفسير تمثل عنصرًا حاسمًا في اعتماد الروبوتات على نطاق واسع، خاصة في البيئات الحساسة مثل الرعاية الصحية أو خطوط الإنتاج الصناعية، حيث لا مجال للأخطاء غير المتوقعة.
كفاءة عالية وتكيّف مع الأجسام المختلفة
أظهرت التجارب أن الذراع الروبوتية استطاعت تعلّم مهام جديدة بسرعة كبيرة من خلال التكيّف الحركي باستخدام تقدير الوضعية والتخطيط الحركي، وهو ما مكّنها من تنفيذ عمليات التقاط ونقل مختلفة بدقة وموثوقية، حتى عند تغيير شكل أو موضع الأجسام.
وهذه القدرة على التعميم ضمن فئة واحدة من المهام تجعل MT3 متفوقًا على أساليب مثل Behavioral Cloning، التي غالبًا ما تفشل عند مواجهة اختلافات بسيطة في البيئة أو الأدوات.
ويرى الباحثون أن هذا العمل يثبت أن تعلّم الروبوتات على نطاق واسع لمهام معقّدة لا يتطلب بالضرورة شبكات عصبية ضخمة أو بيانات هائلة، بل يمكن تحقيق ذلك من خلال أساليب ذكية، فعّالة، وقابلة للتفسير مثل MT3.
وفي المستقبل، يتوقع الفريق أن تسهم تحسينات إضافية في تمكين الروبوتات من تعديل مساراتها الحركية للتعامل مع أجسام غير مألوفة تمامًا، ما سيؤدي إلى تقليص أوقات التدريب وتكاليفه بشكل أكبر، ويدفع نحو استخدام الروبوتات بمرونة وكفاءة أعلى في التطبيقات الواقعية.





0 تعليق